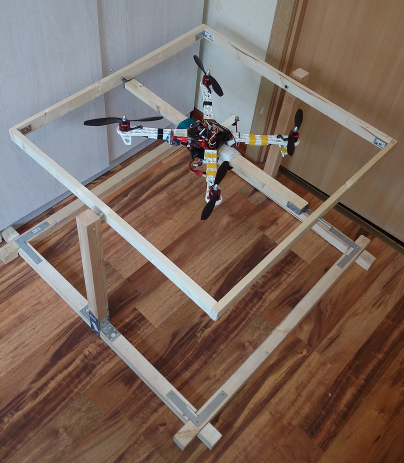
Принцип работы экспериментального стенда КОМЕКС-1 и краткий перечень оборудования, входящего в его состав
Стенд включает в себя квадратную рамку и планку, скрепленные по принципу карданова подвеса. В качестве крепления используются винты, фиксирующие положение планки относительно рамки с помощью специального гнезда. Квадрокоптер зафиксирован на планке. В качестве крепления используются затягивающиеся ремни. Рамка закреплена на ножках, стоящих на большом квадратном основании. Таким образом, квадрокоптер, закрепленный на планке, может вращаться по углам тангажа и крена. Центр тяжести квадрокоптера сохраняет свое положение, что обеспечивает устойчивость всей системы. Тестовый стенд выполнен из деревянных частей и металлических уголков, что обеспечивает практичность в эксплуатации, простоту в сборке и легкость конструкции. В качестве летательного аппарата используется квадрокоптер на базе радиально-лучистой рамы DJI 450 и автопилота Ardupilot Mega 2.6 с инерциальной системой (гироскоп, акселерометр, магнитометр, барометр) и приемником сигнала от спутниковой системы навигации GPS. В квадрокоптере используются бесколлекторные моторы с внешним ротором DJI 2213 (250 ватт каждый), контроллеры оборотов DJI 30A Opto с токоотдачей до 30 A и рабочим напряжением до 14.8 В, несущие винты левого и правого вращения с размерами 10x4.5 или 8x4.5 дюйма, в зависимости от условий полета. Также есть возможность получения данных в режиме реального времени с помощью персонального компьютера через XBee модемы.
Программное обеспечение стенда
Реализация программы автопилота квадрокоптера Arduino Mega 2.5 осуществляется на языке программирования C++, который может быть использован для написания простейших алгоритмов управления. Для загрузки программы и для выгрузки данных телеметрии используется программа Mission Planner, позволяющая, например, преобразовывать данные телеметрии в формат системы Matlab для последующей обработки. Загрузка данных в этой программе осуществляется после прекращения работы квадрокоптера и при подключении автопилота квадрокоптера через USB интерфейс. Работа с кодом программы может вестись как в оригинальной оболочке Arduino или с использованием более мощных и удобных пакетов, например, таких как Microsoft Visual Studio. Стоит отметить, что мощности Arduino Mega может не хватить для работы с алгоритмами более сложного вида. Поэтому возможно осуществление связи квадрокоптера посредством модемов Xbee с персональным компьютером и с установленной на нем связкой Matlab/Simulink. Особенность использования такого подхода заключается в том, что все расчеты сигнала управления осуществляются на больших вычислительных мощностях, однако появляются задержки как в передаче телеметрии к компьютеру, так и в передаче рассчитанного управления от компьютера к автопилоту квадрокоптера. Использование пакета Simulink для синтеза алгоритмов управления также имеет своей целью упрощение работы с квадрокоптером. Так как большинство современных процедур моделирования алгоритмов осуществляется именно в этой среде, то перенос алгоритмов на реальную систему квадрокоптера практически не требует усилий.
Условия хранения, транспортировки и утилизация стенда.
Стенд необходимо располагать в сухом отапливаемом помещении во избежание гниения деревянных частей конструкции.
Перечень основного оборудования экспериментального стенда КОМЕКС-1, содержащий наименование и основные характеристики приборов
- Автопилот Ardupilot Mega 2.6 (4 шт); 3-х осевой гироскоп, акселерометр Invensense's 6 DoF Accelerometer/Gyro MPU-600, магнитометр (до 2.5.2), барометр MS5611-01BA03, удержание позиции по GPS, полет по точкам и возврат на точку старта, поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки, автоматическое следование по маршрутным точкам, управление двигателями посредством ШИМ (PWM) с использованием регуляторов скорости (ESC).
- Модуль связи Xbee PRO S2B (2 шт.). Радиус действия в помещении, м - до 90, радиус действия в свободном пространстве, м - до 3200, максимальная выходная мощность, мВт - 63 (+18 дБм), чувствительность, дБм - –102, топология сети -Point-to-point, Point-to-multipoint, Peer-to-peer, Mesh, рабочая частота, ГГц - 2,4–2,4835, количество каналов – 15, скорость передачи полезных данных, кбит/с - до 35, рабочий диапазон температур, °С - –40... +85
- Корпус летательного аппарата (рама DJI 450). Модель - Flame Wheel 450 (F450), масса рамы - 282 грамм, диагональная база - 450мм, взлетный вес - 800 ~ 1600 грамм.
- Мотор DJI 2213. Взлетный вес - 300 грамм/ось, максимальная тяга - 800 грамм/ось, рабочая температура -5°С ~ 40°C.
- Контроллер оборотов DJI 30A Opto. Сила тока: 30 А; рекомедованный аккумулятор: Li-Po 3S-4S; частота: 30 - 450 Гц. Использование: с моторами DJI 2213.
- Аккумулятор 11.1 V 4000 mAh. Напряжение - 11.1 В (3S), емкость 4000 мАчас, тип – LiPo.
- Карданный подвес для квадрокоптера. Материал – дерево, стальные уголки, размеры 76 х 76х 60 мм, габариты основания – 80 х 80 мм..
- Ноутбук Lenovo Think Pad x240. Операционная система - Windows 7 Professional, тип экрана - TN+film, диагональ экрана - 12.5", разрешение экрана - -366x768, процессор - Intel Core i5 4300U, количество ядер 2, частота - 1.9 ГГц, аккумулятор Li-Ion 4180 мАч, габариты – 207х305х20, вес – 1. кг.
Перечень выполняемых типовых работ
- Синтез и исследование типовых (ПИ- ПИД-) алгоритмов управления угловым положением стенда;
- Синтез и исследование алгоритмов управления на основе метода линеаризации обратной связью;
- Разработка, проведение и сравнительный анализ методов идентификации параметров;
- Исследование методов управления и оценивания в сетевых системах при коммуникационных ограничениях;
- Исследование методов управления мультиагентными системами (проводится на двух экземплярах стенда);
- Исследование методов адаптивного и робастного управления;
- Исследование методов компенсации возмущений.
Перечень применяемых методик измерений
Вся измерительная аппаратура лабораторного тестового стенда располагается на квадрокоптере и связана с бортовым компьютером. Для измерения используются инерциальная система, в которую входят гироскоп и акселерометр.
- трехосевой гироскоп имеет программно устанавливаемые диапазоны измерений угловой скорости ±250, ±500, ±1000 и ±2000 град/с, и 16-разрядную плату считывания данных;
- акселерометр имеет программно устанавливаемые диапазоны измерений линейных ускорений ±2g, ±4g, ±8g и ±16g, и 16-разрядную плату считывания данных;
- встроенный генератор сигналов считывания с вариацией частоты не более ±1%;
- модуль связи Xbee PRO S2B. Радиус действия в помещении - до 90 м, выходная мощность, до 63 мВт (+18 дБм), чувствительность - минус 102 дБм, рабочая частота - 2,4–2,4835 ГГц, скорость передачи полезных данных - до 35 кбит/с.
Все данные записываются во внутреннюю память автопилота и могут быть переданы в режиме реального времени на персональный компьютер с использованием модуля связи Xbee PRO S2B.
Степень уникальности стенда
Уникальность стенда КОМЕКС-1 определяется оригинальностью конструкции, включающей карданов подвес и переходом от поступательного движения к вращательному, что позволяет проводить эксперименты с дроном в комнатных условиях. Стенд КОМЕКС-1 является уникальным оброрудованием, которое может использоваться в проведении экспериментальных исследований для широкого круга задач управления, оценивания, передачи и обработки данных, и, кроме того, комплекс КОМЕКС-1 может использоваться непосредственно к качестве установки для предполетной подготовки выбранных экземпляров квадрокоптеров.
Публикации
- Томашевич С.И., Белявский А.О. Двухстепенной стенд для исследования алгоритмов управления движением квадрокоптера в условиях порывистого ветра // Известия Российской академии ракетных и артиллерийских наук - 2016. - № 2(92). - С. 50-54.
- Томашевич С.И., Белявский А.О. Двухстепенной комнатный стенд для исследования алгоритмов идентификации и управления движением квадрокоптера // XXIII Санкт-Петербургская международная конференция по интегрированным навигационным системам (Санкт-Петербург, 30мая-1июня 2016г.) - 2016. - С. 317-320.
- Томашевич С.И. Экспериментальный лабораторный комплекс для исследования взаимодействия квадрокоптеров в группе // Тез. докл. XIX конференции молодых ученых "Навигация и управление движением"(XIXКМУ2017) - 2017
- Tomashevich S.I., Borisov O.I., Gromov V.S., Pyrkin A.A., Bobtsov A.A. Experimental study on robust output control for quadcopters // 25th Mediterranean Conference on Control and Automation, MED 2017 - 2017, pp. 1029-1034. DOI: 10.1109/MED.2017.7984253.
- Belyavskyi A.O., Tomashevich S., Andrievsky B. Application of 2DOF Quadrotor-based Laboratory Testbed for engineering education // 25th Mediterranean Conference on Control and Automation, MED 2017 - 2017, pp. 939-944. DOI: 10.1109/MED.2017.7984240.