СВ-2М
 Экспериментальный комплекс СВ-2М является уникальной установкой для исследования и отработки алгоритмов управления механическими колебаниями подвижных элементов стенда в различных режимах работы. При этом могут решаться следующие группы задач:
Экспериментальный комплекс СВ-2М является уникальной установкой для исследования и отработки алгоритмов управления механическими колебаниями подвижных элементов стенда в различных режимах работы. При этом могут решаться следующие группы задач:
Принцип работы экспериментального комплекса СВ-2М и краткий перечень оборудования, входящие в его состав
На лабораторном столе установлены исследовательский компьютер и шкаф управления и питания. На дополнительном столе установлен электромеханический узел.
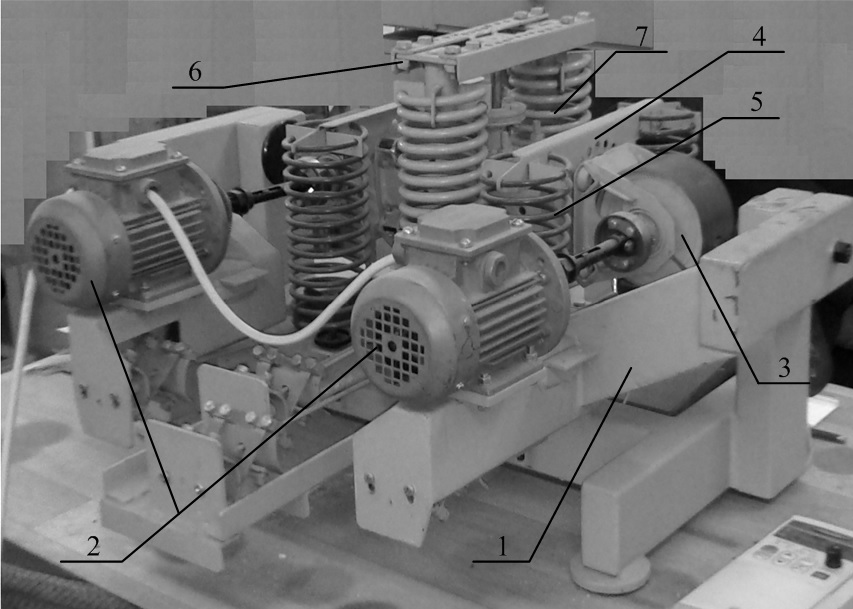
Для возбуждения колебаний и управления движением объектов А (нижняя платформа) и Б (верхняя платформа) электромеханический узел содержит два электрических генератора колебаний (далее вибровозбудителей) с независимым управлением. Каждый вибровозбудитель состоит из асинхронного электродвигателя с закрепленной на его валу несбалансированной массой (неуравновешенный ротор). При вращении роторов возникают колебания платформ А и Б. Частота механических колебаний регулируется управляющими сигналами, определяющим скорости вращения роторов электродвигателей. Путем изменения величины дисбаланса массы неуравновешенных роторов возможна настройка амплитуды создаваемых колебаний на заданной частоте колебаний.
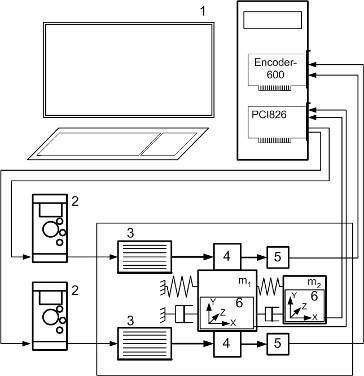
Для оперативного управления работой электродвигателей вибровозбудителей предусмотрено аналоговое задание скорости вращения каждого ротора. Для этого используется передача сигнала управления от исследовательского компьютера на частотные преобразователи через цифроаналоговый преобразователь (ЦАП). Для исследовательских целей на стенде дополнительно установлены аналоговые оптоэлектронные датчики перемещений платформ (по 6 на каждую платформу), датчики линейных ускорений и угловых скоростей платформ (по 3 на каждой платформе). Сигналы от всех датчиков передаются на исследовательский компьютер для обработки и использования. Программный продукт Simulink Desktop Real-Time, установленный на исследовательском компьютере, позволяет собрать всю информацию о работе стенда. На этом уровне осуществляется обработка информации и реализация законов оперативного управления работой стенда. Результаты работы стенда отображаются на мониторе и могут быть сохранены в цифровом виде на жестком диске компьютера. В установке использованы трехфазные асинхронные электродвигатели марки 5А50М мощностью 0,09 кВА. Номинальная частота вращения ротора двигателя 2760 об/мин (46 об/с), что позволяет при регулировании скоростей вращения роторов электродвигателей возбуждать механические колебания объектов в диапазоне частот от 0 до 46 Гц. Управление двигателями осуществляется посредством двух частотных преобразователей Altivar ATV12H018M2 фирмы Schneider Electric. Измерение углов поворота роторов выполняется энкодерами марки Е30S4-1000-6L-5, которые обеспечивают разрешение по углу равное 1/4000 оборота ротора. В качестве оптических датчиков перемещения платформ в стенде применены рефлекторные датчики Smart Grayscale Sensor фирмы DFRobot. Диапазон измеряемых перемещений 0-100 мм. Для измерения угловых скоростей и ускорений платформ в установке использовано два комбинированных датчика, каждый из которых составлен из линейного акселерометра и датчика угловых скоростей и ускорений. Измерение линейных ускорений осуществляется датчиком H3LIS331DL фирмы STMicroelectronics. Датчик позволяет измерять ускорение вдоль трех ортогональных направлений и размещен на платформе так, чтобы его измерительные оси совпадали с осями соответствующей платформы. Датчик имеет три переключаемых пользователем диапазона измерений - ±100g, ±200g, ±400g. Микросхема H3LIS331DL установлена на модуле датчика угловых скоростей Pololu L3GD20. Модуль датчика Pololu L3GD20 предназначен для измерения угловых скоростей поворота платформ относительно трех осей. Датчик имеет три переключаемых пользователем диапазона измерений - ±250, ±500, ±2000 град/с. В качестве исследовательского компьютера использован универсальный компьютер IBM PC в который установлены промышленные платы сопряжения с физическими объектами: универсальная плата ввода-вывода аналоговых сигналов PCI-828LU фирмы IPC и плата сопряжения с энкодерами Encoder-600 фирмы PISO. На исследовательском компьютере установлено лицензированное программное обеспечение MATLAB 2015 с расширением Simulink и Desktop Real-Time.
Перечень основного оборудования экспериментального комплекса СВ-2М, содержащий наименование и основные характеристики приборов
- Асинхронный электродвигатель 5А50М (2 шт.). Мощность 0.09 кВА. Напряжение 220/380 В. Ток 0.70/0.40 А. Номинальная частота вращения 2760 об/мин. Масса 3.04 кг. КПД 60%.
- Частотный преобразователь Altivar ATV12H018M2 (2 шт.). Силовая часть: напряжение 220В, мощность 0.18кВт, ток 1.4А; метод управления: скалярный, векторный и квадратичный; запас по перегрузке: 150%; диапазон выходной частоты: 1 ... 400Гц; интерфейсы: RS-232/RS-485; ПИД-регулятор; S и U-образные кривые разгона/торможения; габариты 72х142х102; масса 0.7 кг.
- Энкодер Е30S4-1000-6L-5(2 шт.). Тип: инкрементальный оптический; оптическое разрешение 1000 импульсов за оборот, выходная фаза: фаза A, не A, B, не B, Z, не Z , выход: Line drive, источник питания: 4.75...5.25 В пост. тока; диаметр вала 4 мм; габариты 30×30×42.5 мм.
- Оптический датчик перемещения Smart Grayscale Sensor SKU:SEN0147 (12 шт.). Напряжения питания: 5 В пост. тока; интерфейс: цифровой/аналоговый; выход: в аналоговой моде 0-5 В; в цифровой моде - TTL (0 В или 5В, в зависимости от требований применения); цифровая мода допускает определение цвета; размеры 37x10x15 мм.
- Датчик линейных ускорений H3LIS331DL (2 шт.). Рабочие оси X, Y, Z; диапазон измерения ±100 g/±200 g /±400 g; выходной интерфейс SPI, I²C; напряжение питания 2.16...3.6 В; ток потребления 10 мкА; выход: 16 разрядов; частота измерения 0.5 Гц to 1кГц; рабочая температура -45...85 °С.
- Датчик угловых скоростей Pololu L3GD20 (2 шт.). Измерительные оси: X, Y, Z; диапазоны измерения: ±250°/с, ±500°/с, ±2000°/с; цифровой интерфейс I²C или SPI; напряжение питания 2.5...5.5 В; выходные данные: 16 бит на каждую ось; размеры: 13 × 23 × 3 мм.
- Плата ввода-вывода аналоговых сигналов PCI-828LU. Системная шина: Universal PCI; каналов аналогового ввода: 32; каналов с общим проводом: 32; дифференциальных каналов: 16; диапазон входного сигнала по напряжению: +/-10 В; частота выборки АЦП: 250 кГц; разрядность АЦП: 16 бит; точность измерений (+/-): 0.05 %; аналоговый вывод – 2 канала; диапазон выходного сигнала по напряжению: 0...5 В, 0...10 В, +/-5 В, +/-10 В; разрядность ЦАП: 16 бит; точность выходного сигнала: 0.06 %; каналов дискретного ввода-вывода: 32; каналов дискретного ввода: 32; каналов дискретного вывода: 32; дискретный ввод: всего каналов: 32; каналов дискретного вывода: 32; выходное напряжение: 0 ... 5 В; максимальный выходной ток: 0.8 мА; совместимость с операционными системами: Linux kernel 2.6, Windows XP, Windows 7, Windows Vista; габариты 22х150х170 мм.
- Плата сопряжения с энкодерами Encoder-600. Содержит 3-х осевой или 6-осевой счетчик; 32-х разрядный счетчик на каждую ось; максимальная скорость счета 1 МГц; сброс индекса с помощью C+/C-канала, который сбрасывает каждый оборот. Аппаратный сброс - внешним разъемом (HR1 ~ HR6), который также может быть цифровым входом. Имеются 8-и канальные цифровые выходы. Поддержка драйверов DOS, Windows 95 и Windows NT. Режимы подсчета: QUADRANT, Режим CW_CCW; PULSE_DIR. Режимы сброса счетчика: Сброс регистра; Сброс индекса; Сброс оборудования. Шина PCI. Счетчик энкодера: 3-х осевой; 32 бит. Максимальная скорость счета: 1 МГц. Внутренний цифровой фильтр третьего порядка. Режимы подсчета: квадрант, CW_CCW, PULSE_DIR.
- Источник питания DRA05-05A CHINFA (3 шт.). Выходная мощность (ном) 5Вт; выход – 5 В; напряжение 1 канала 4.5...5.75 В; выходной ток 1 канала – 0...1 А; тип стабилизации - напряжение; количество выходов – 1; тип управления выходом – потенциометр; входное напряжение AC – 90...265 В; входное напряжение DC – 120...370 В; коэффициент мощности – 0.55; КПД - 69%; шум – 50 мВ; размер - 22.5×114×90 мм.
- Источник питания DRA18-24A CHINFA. Выходная мощность (ном) 18 Вт; выход – 24 В; напряжение 1 канала 22.6...28.8 В; выходной ток 1 канала – 0...750 мА; тип стабилизации - напряжение; количество выходов – 1; тип управления выходом – потенциометр; входное напряжение AC – 90...265 В; входное напряжение DC – 120...370 В; коэффициент мощности – 0.6; КПД - 77%; шум – 50 мВ; размер - 22.5×114×90 мм.
- Монитор DELL S2740L. Диагональ: 27 дюймов; формат: 16:9; панель: IPS; разрешение: 1920 x 1080 пикселей; контрасность 8.000.000:1 (динамическая); яркость: макс. 270 кд/м²; время отклика: 7 мс; интерфейсы: 1x HDMI, 1x D-Sub, 1x DVI-D, 2x USB 2.0 (для периферии), 1x USB 2.0 (для ПК), 1x 3,5-мм аудио, HDCP: через DVI-D, HDMI; габариты: 641,9 x 458,7 x 215,8 мм.
Перечень выполняемых типовых работ
- Исследование особенностей возбуждения колебаний и отработка алгоритмов управления связанными генераторами механических колебаний: синхронный и асинхронный режимы работы генераторов; управление фазой колебаний путем управления скоростями вращения роторов электродвигателей;
- Возбуждение колебаний элементов конструкции с заданными параметрами;
- Исследование взаимовлияния подвижных элементов с различными резонансными частотами и оптимизации алгоритмов управления генераторами механических колебаний;
- Определение условий максимальной передачи энергии выделенному объекту управления в группе связанных элементов; отработка алгоритмов прохождения механических резонансов;
- Отработка нелинейных алгоритмов управления для передачи энергии с максимальным к.п.д.
Перечень применяемых методик измерений
Измерение физических переменных осуществляется с применением компьютеризованных средств и привлечения лицензированного программного обеспечения MatLab Simulink RealTime 2015. В зависимости от количества одновременно обрабатываемых сигналов минимально достижимый период квантования времени составляет 0.05 – 0.002 секунды.
На стенде возможно проведение следующих измерений в любых сочетаниях:
- Измерение углов поворота дебалансов вибровозбудителей с разрешением 4000 имп./оборот. Аппаратными средствами определяются углы поворота дебалансов либо на одном обороте относительно фиксированного начала отсчета, либо накопленные углы поворота дебалансов относительно положений в начале эксперимента. Формат представления данных – целочисленный, 32 бита;
- Измерение перемещений обеих платформ в пространстве в диапазоне 0-100 мм. Формат представления данных – целочисленный, 16 бит;
- Измерение угловых скоростей обеих платформ в пространстве с использованием трехстепенных твердотельных гироскопов. Формат представления данных – целочисленный, 16 бит;
- Измерение линейных ускорений обеих платформ в пространстве с использованием трехстепенных твердотельных акселерометров. Формат представления данных – целочисленный, 16 бит.
Обработка получаемых сигналов и визуализация выполняется в реальном времени по алгоритмам пользователя средствами MATLAB/Simulink. Указанные программнные средства позволяют организовать измерения в воответствии с разработанными пользователями методикой измерений и планом проведения эксперимента.
Степень уникальности стенда обеспечивается:
- Оригинальной двухплатформенной схемой электромеханического узла, позволяющей исследовать основные вибрационные эффекты механических колебательных систем.
- Независимо управляемой двухканальной схемой возбуждения механических колебаний платформ, позволяющей исследовать разнообразные виды колебаний объектов и их взаимовлияние.
- Наличием широкого набора измерительных средств, передающих информацию о параметрах колебаний платформ непосредственно в исследовательский компьютер.
- Наличием мощной программной среды обработки информации в режиме реального времени, оперативно настраиваемой пользователем на решение конкретной исследовательской задачи.
Экспериментальный комплекс СВ-2М представляет собой уникальную систему автоматизации научных исследований и разработки систем управления механическими колебаниями элементов вибрационных установок.
Публикации
- Андриевский Б.Р., Блехман И.И., Блехман Л.И., Бойков В.И., Васильков В.Б., Фрадков А.Л. Учебно-исследовательский мехатронный комплекс для исследования вибрационных устройств и процессов // Проблемы машиностроения и надежности машин. 2016. № 4. С. 90-97.
- Boikov V.I., Andrievsky B., Shiegin V.V. Experimental study of unbalanced rotors synchronization of the mechatronic vibration setup // Cybernetics and Physics. 2016. V. 5. № 1. P. 5-11.
- Andrievsky B., Fradkov A.L., Seifullaev R.E., Boikov V.I. Mechatronic laboratory setup for study of controlled nonlinear vibrations // IFAC-PapersOnLine. 2016. V. 49. № 14. P. 1-6. https://doi.org/10.1016/j.ifacol.2016.07.963.
- Fradkov A., Tomchin D., Gorlatov D., Tomchina O. Control of oscillations in vibration machines: start up and passage through resonance // Chaos (Woodbury, N.Y.). 2016. V. 26. № 11. P. 116310. https://doi.org/10.1063/1.4966632
- Andrievsky B., Boikov V.I. Experimental study of multiresonance mechatronic vibrational laboratory set-up // Cybernetics and Physics. 2017. V. 6. № 1. P. 5-12.