
Принцип работы экспериментального комплекса КвадРой-1 и краткий перечень оборудования, входящего в его состав
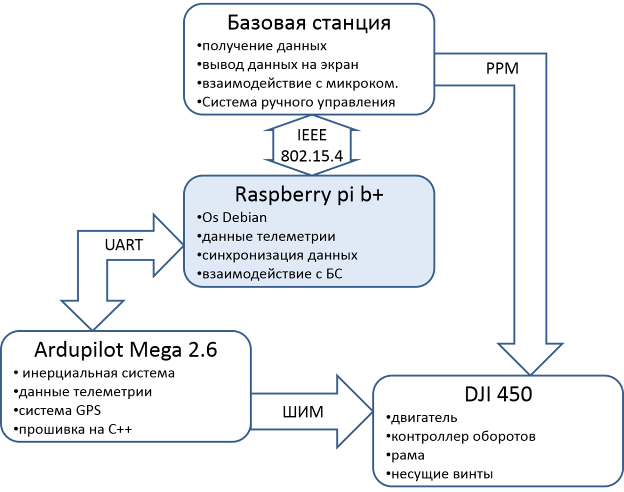
Экспериментальный комплекс КвадРой-1 имеет в своем составе четыре квадрокоптера, управляющий компьютер оператора, пульты оператора для управления квадрокоптерами, зарядные устройства и вспомогательное обрудование. Кадрокоптеры комплекса могут управляться: оператором вручную, автономно по введенной программе, по радиоканалу от компьютера оператора, а также децентрализованно с использованием радиоканала для взаимного обмена информацией и/или передачи информации от компьютера оператора к ведущему квадрокоптеру («лидеру группы»). Последний режим является основным, и обеспечивает уникальность комплекса как средства для разработки, отладки и тестирования систем децентрализованного управления групповым движением мобильных роботов через сети связи. Для обеспечения требуемой функциональности в бортовое оборудование квадрокоптеров введен дополнительный микрокомпьютер и аппаратура обмена данными по радиоканалу. Наличие дополнительного микрокомпьютера в схеме управления квадрокоптером дает возможность организации группового взаимодействия, упрощение системы интеграции новых алгоритмов, не уменьшая при этом надежности и работоспособности БПЛА. Тем самым обеспечивается надежное выполненеие автопилотом удержание БПЛА в полете и движение по заданному азимуту или маршруту, а остальные функции – расчет маршрута, расчет направления движения, управление дополнительным оборудованием и другие, выполняются на дополнительном микрокомпьютере Raspberry Pi Model B+.
Компоненты квадрокоптера:
- Корпус летательного аппарата (рама DJI 450).
- Несущие винты (два левого вращения и два правого вращения).
- Рожковый ключик для затяжки несущих винтов.
- Зарядное устройство бортового аккуммулятора.
- Пульт ручного управления.
- Бортовой аккумулятор.
- Стойки шасси.
- Микрокомпьютер Raspberry Pi Model B+
- Модуль связи Xbee
- Автопилот Ardupilot 2.6
- Модуль разводки питания
- Модуль GPS и магнитометр
Основные элементы архитектуры БПЛА:
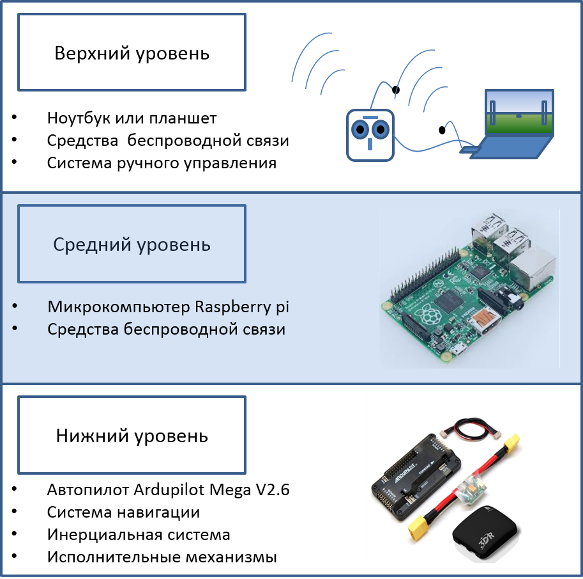 Верхний уровень архитектуры представлен переносным компьютером (ноутбук) и средствами связи – базовой станцией. В качестве средств связи между базовой станцией и микрокомпьютером и организации группового взаимодействия используется построение сети с помощью модулей Xbee.. Также на верхнем уровне находится система ручного управления, которая представлена системой радиоуправления фирмы Hitec с рабочей частотой 2.4 ГГц. Ручная система управления применяется для взлета, посадки, экстренного перехвата управления из автоматического режима полета при возможных сбоях в прошивке автопилота.
Средний уровень архитектуры представлен микрокомпьютером Raspberry pi model b+, который построен на базе процессора Broadcom SoC ARM11 с тактовой частотой 700 МГц, имеет 512 Mb SDRAM, 4 USB порта, Ethernet порт, и небольшое энергопотребление 2A при напряжении 5V.
На нижнем уровне архитектуры располагается автопилот Ardupilot Mega 2.6 с инерциальной навигационной системой (гироскоп, акселерометр, магнитометр, барометр) и приемником сигнала от спутниковой системы навигации GPS. Автопилот Ardupilot Mega 2.6 построен на чипах Atmel's ATMEGA 2560, имеет 8 входов и выходов для работы с ШИМ сигналом, три порта UART, встроенную плату FTDI, 8 аналоговых входов, 4 Mb Flash памяти для записи данных лога телеметрии, оснащен Invensense's 6 DoF Accelerometer/Gyro MPU-6000, барометром MS5611-01BA03.
Система навигации GPS построена на основе ublox LEA-6H модуля с частотой обновления данных 5 Гц.
Нижний уровень представлен корпусом БПЛА – рама квадрокоптера DJI 450. Схема корпуса – радиально-лучистая с размером в диаметре 450мм. На конце каждого из 4-х лучей расположен бесколлекторный двигатель с внешним ротором и контроллер оборотов - управляющие механизмы. Основные характеристики БПЛА:
Верхний уровень архитектуры представлен переносным компьютером (ноутбук) и средствами связи – базовой станцией. В качестве средств связи между базовой станцией и микрокомпьютером и организации группового взаимодействия используется построение сети с помощью модулей Xbee.. Также на верхнем уровне находится система ручного управления, которая представлена системой радиоуправления фирмы Hitec с рабочей частотой 2.4 ГГц. Ручная система управления применяется для взлета, посадки, экстренного перехвата управления из автоматического режима полета при возможных сбоях в прошивке автопилота.
Средний уровень архитектуры представлен микрокомпьютером Raspberry pi model b+, который построен на базе процессора Broadcom SoC ARM11 с тактовой частотой 700 МГц, имеет 512 Mb SDRAM, 4 USB порта, Ethernet порт, и небольшое энергопотребление 2A при напряжении 5V.
На нижнем уровне архитектуры располагается автопилот Ardupilot Mega 2.6 с инерциальной навигационной системой (гироскоп, акселерометр, магнитометр, барометр) и приемником сигнала от спутниковой системы навигации GPS. Автопилот Ardupilot Mega 2.6 построен на чипах Atmel's ATMEGA 2560, имеет 8 входов и выходов для работы с ШИМ сигналом, три порта UART, встроенную плату FTDI, 8 аналоговых входов, 4 Mb Flash памяти для записи данных лога телеметрии, оснащен Invensense's 6 DoF Accelerometer/Gyro MPU-6000, барометром MS5611-01BA03.
Система навигации GPS построена на основе ublox LEA-6H модуля с частотой обновления данных 5 Гц.
Нижний уровень представлен корпусом БПЛА – рама квадрокоптера DJI 450. Схема корпуса – радиально-лучистая с размером в диаметре 450мм. На конце каждого из 4-х лучей расположен бесколлекторный двигатель с внешним ротором и контроллер оборотов - управляющие механизмы. Основные характеристики БПЛА:
Основные функции верхнего уровня:
Правила техники безопасности при работе с комплексом
Правила по обращению с Li-Po аккумуляторами
Перечень основного оборудования экспериментального комплекса КвадРой-1, содержащий наименование и основные характеристики приборов
- Аппаратура радиоуправления Optic 6 Sport (4 шт.). Частота 2.4 ГГц (3,00 Мб), Память на 10 моделей, EPA (подстройка конечных точек), реверсирование серво, субтримминг, экспонента (каналы 1, 2 и 4), двойные расходы D/R (каналы 1, 2 и 4), обнуление данных, выбор модели, изменение МОДов (Мод 1/2), выбор сдвига, 1 программируемый микс (P-Mix), таймер, отсечка газа, или режим инструктора, 3 полётных режима.микрокомпьютер Raspberry Pi Model B+(4 шт.).
- Модуль связи Xbee PRO S2B (5 шт.). Радиус действия в помещении, м - до 90, радиус действия в свободном пространстве, м - до 3200, максимальная выходная мощность, мВт - 63 (+18 дБм), чувствительность, дБм - –102, топология сети -Point-to-point, Point-to-multipoint, Peer-to-peer, Mesh, рабочая частота, ГГц - 2,4–2,4835, количество каналов – 15, скорость передачи полезных данных, кбит/с - до 35, скорость передачи данных по радиоканалу, кбит/с – 250, скорость передачи данных по интерфейсу - 1200 бит/с – 1 Мбит/с, напряжение питания, В - 2,7–3,6, ток потребления в режиме передачи, мА (при 3,3 В) – 205, ток потребления в режиме приема, мА (при 3,3 В) – 47, шифрование AES-128, внешние интерфейсы UART, GPIO, PWM, ADC, размеры, мм 24,38×32,94, рабочий диапазон температур, °С - –40... +85
- Автопилот Ardupilot Mega 2.6 (4 шт); 3-х осевой гироскоп, акселерометр Invensense's 6 DoF Accelerometer/Gyro MPU-600, магнитометр (до 2.5.2), барометр MS5611-01BA03, удержание позиции по GPS, полет по точкам и возврат на точку старта, поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки, автоматическое следование по маршрутным точкам, управление двигателями посредством ШИМ (PWM) с использованием регуляторов скорости (ESC), поддержка датчика уровня заряда батареи, поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK, бортовая флеш память 16Мбит, цифровой компас работает на HMC5883L (до версии 2.5.2), 6 степеней свободы в InvenSense акселерометре , гироскоп MPU-6000,контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB.
- Микрокомпьютер Raspberry Pi Model B+ (4 шт.). Чип Broadcom BCM2837B0, четыре ядра ARM Cortex-A53, частота — 1,4 ГГц, объём оперативной памяти — 1 Гбайт, двухдиапазонный (2,4/5 ГГц) адаптер беспроводной связи Wi-Fi с поддержкой стандартов IEEE 802.11b/g/n/ac, контроллер Bluetooth 4.2/LE.
- Корпус летательного аппарата (рама DJI 450) (4 шт.). Модель - Flame Wheel 450 (F450), масса рамы - 282 грамм, диагональная база - 450мм, взлетный вес - 800 ~ 1600 грамм.
- Мотор DJI 2213 (4 шт). Взлетный вес - 300 грамм/ось, максимальная тяга - 800 грамм/ось, рабочая температура -5°С ~ 40°C, размер статора 22х12мм, обороты/мин. - 960, вес мотора - 55 грамм, пропеллер - 24х11см (9.4х4.5").
- Контроллер оборотов DJI 30A Opto (4 шт.). Сила тока: 30 А; рекомедованный аккумулятор: Li-Po 3S-4S; частота: 30 - 450 Гц. Использование: с моторами DJI 2213.
- Аккумулятор 11.1 V 4000 mAh(4 шт.). Напряжение - 11.1 В (3S), емкость 4000 мАчас, тип - LiPo
- Ноутбук Lenovo Think Pad x240 Операционная система - Windows 7 Professional, тип экрана - TN+film, диагональ экрана - 12.5", разрешение экрана - -366x768, процессор - Intel Core i5 4300U, количество ядер 2, частота - 1.9 ГГц, автоматическое увеличение частоты - 2.9 ГГц, кэш L2 - 512 Кб, кэш L3 - 3 Мб, архитектура процессора – Haswell, оперативная память - DDR3, частота 600 МГц, размер 8 ГБ, количество слотов – 1, максимально устанавливаемый объем памяти - 8 Гб, тип видеопамяти – SMA, объем видеопамяти - выделяется из оперативной, модель встроенной видеокарты - Intel HD 4400, общий объём жестких дисков (HDD), общий объем твердотельных накопителей (SSD) 128 Гб, поддержка карт памяти карт-ридером - SD, SDHC, SDXC, MMC, беспроводные виды доступа в Интернет - Wi-Fi 802.11b/g/n, Bluetooth 4.0, порты USB 3.0 – 2, Видео интерфейсы - mini DisplayPort, VGA (D-Sub), Аудио интерфейсы - 3.5 мм jack (микрофон/аудио), аккумулятор Li-Ion 4180 мАч, габариты – 207х305х20, вес – 1. кг.
Перечень выполняемых типовых работ
- Управление отдельными квадрокоптерами со стороны оператора для получения навыков работы с комплексом.
- Ввод и отладка тестовых программ полета одиночного квадрокоптера дла реализации заданной программных траекторий полета.
- Централизованное правление группой квадрокоптеров через копмпьютер оператора для выполнения заденных миссий группового полета.
- Децентрализованное автономное управление группой квадрокоптеров с обменом информацией между ними по типу ведущий-ведомый.
- Ввод и тестирование пользовательских алгоритмов автопилотирования квадрокоптеров.
- Ввод и тестирование пользовательских алгоритмов группового управления квадрокоптерами.
Перечень применяемых методик измерений
Вся измерительная аппаратура на экспериментальном квадрокоптерном комплексе располагается на квадрокоптерах и связана с их бортовыми компьютерами. Для измерения используются: инерциальная система, в которую входят гироскоп и акселерометр; приемник сигнала от спутниковой системы навигации GPS; барометр.
- трехосевой гироскоп MPU-6000 имеет программно устанавливаемые диапазоны измерений угловой скорости ±250, ±500, ±1000 и ±2000 град/с, и 16-разрядную плату считывания данных;
- акселерометр MPU-6000 имеет программно устанавливаемые диапазоны измерений линейных ускорений ±2g, ±4g, ±8g и ±16g, и 16-разрядную плату считывания данных;
- встроенный генератор сигналов считывания с вариацией частоты не более ±1%;
- барометр MS5611-01BA03. Диапазон измерений давления 10-1200 мбар, разрешающая способность 0.065 / 0.042 / 0.027 / 0.018 / 0.012 мбар на соответсвующих коэффициентах выборки 256/512/1024/2048/4096, ошибка - не более 1.5 мбар (при температуре 25°C, давлении 750 мбар) и не более 2.5 мбар (при температуре от -20°C до +85°C и давлении от 450 до 1100 мбар), время отклика 0.5 / 1.1 / 2.1 / 4.1 /8.22 мс;
- модуль связи Xbee PRO S2B. Радиус действия в помещении - до 90 м, выходная мощность, до 63 мВт (+18 дБм), чувствительность - минус 102 дБм, рабочая частота - 2,4–2,4835 ГГц, скорость передачи полезных данных - до 35 кбит/с.
Все данные записываются во внутреннюю память автопилотов и могут быть переданы в режиме реального времени на персональный компьютер оператора с использованием модуля связи Xbee PRO S2B.
Степень уникальности стенда
Экспериментальный комплекс КвадРой-1 представляет собой уникальную систему для проведения исследований централизованного и децентрализованного управления группой мобильных роботов (квадрокоптеров) с возможносстью ввода и тестирования пользовательских алгоритмов управления как на нижнем уровне (алгоритмы автопилотирования), так и на уровне сетевого управления группой, а также организации обеспечения различных миссий, выполняемых группой БПЛА.
Публикации
- Andrievsky B., Tomashevich S., Fradkov A.L., Amelin K. Quadrocopters formation control over the limited-band communication network // IFAC-PapersOnLine. 2015. V. 48. № 9. P. 85-90. https://doi.org/10.1016/j.ifacol.2015.08.064.
- Amelin K., Andrievsky B., Tomashevich S. Recursive identification of motion model parameters for ultralight UAV // IFAC-PapersOnLine. 2015. V. 48. № 11. P. 233-237. https://doi.org/10.1016/j.ifacol.2015.09.189.
- Andrievsky B., Tomashevich S. Passification based signal-parametric adaptive controller for agents in formation //IFAC-PapersOnLine. 2015. V. 48. № 11. P. 222-226. https://doi.org/10.1016/j.ifacol.2016.07.974
- Амелин К.С., Андриевский Б.Р., Томашевич С.И., Фрадков А.Л. Передача данных с адаптивным кодированием между квадрокоптерами в формации // Управление большими системами: сборник трудов. 2016. № 62. С. 188-213.