

Стенд для испытания алгоритмов управления электроэнергетической сетью

Принцип работы экспериментального комплекса
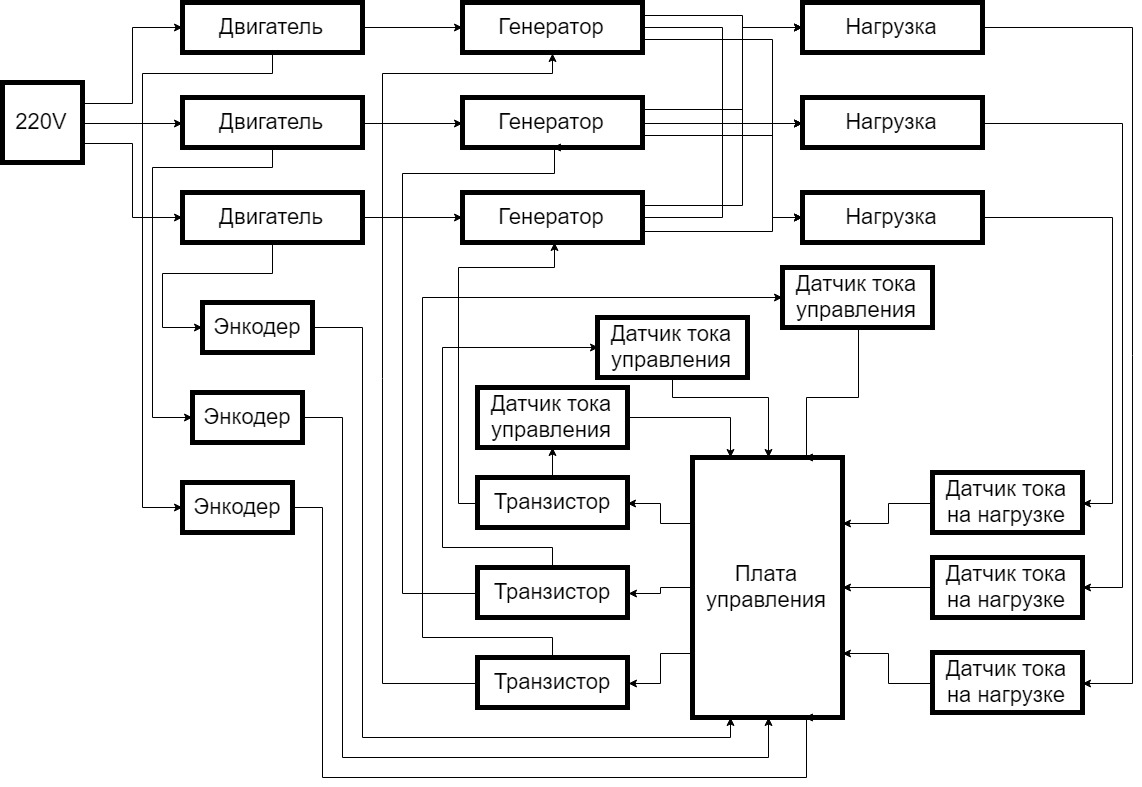
Объектами управления являются три электрических генератора (модель 371.3701), каждый из которых имеет:
- Прямую механическую связь с электрическим двигателем (модель 5АИЕ 71 В2) для приведения генератора в движение.
- Обмотку возбуждения ротора для управления вырабатываемой генератором энергии.
- 3 фазы выходного тока для снятия нагрузки.
Роль источника механического воздействия на генераторы играют электрические двигатели переменного тока, питающиеся от сети 220 Вольт. Вал двигателя и генератора соединен гибкой муфтой, на которой закреплен диск для работы оптического энкодера (модель FC-03). Энкодер служит для получения данных о скорости вращения вала генератора. Полученные данные передаются напрямую в плату управления (модель STM32).
Для снятия нагрузки генераторов используются балластные реостаты (модель РБ - 302) и катушки индуктивности со сварочных аппаратов. При этом одинаковые фазы с 3 генераторов соединены и подключены к 3 разным нагрузочным устройствам. На вторую клемму нагрузочного устройства подключен общий «0» объединенный с трех генераторов.
Получение данных о токе, протекающем через нагрузку обеспечивают 3 датчика переменного тока (модель ACS712) подключенные каждый к соответствующей нагрузке, сигнал с датчиков идет на плату управления.
Плата управления состоит из двух устройств, связанных между собой через UART. Роль вычислительной машины, на которой идет расчет управляющих сигналов выполняет персональный компьютер с установленным пакетом программ MATLAB/Simulink. Вторая плата STM32 предназначена для сбора информации с датчиков, обмена информацией с персональным компьютером и генерации ШИМ-сигнала управления транзисторами. MOSFET транзисторы обеспечивают прохождения необходимого тока через обмотку управления ротора генератора. Имеют внешнее питание 12 Вольт. Для настройки работы транзисторов используются датчики тока в цепи обмотки возбуждения, сигнал с которых идет на плату управления.
Перечень основного оборудования экспериментального комплекса, содержащий наименование и основные характеристики приборов
- Генератор 371.3701. Максимальная мощность 770 Вт, номинальное напряжение 14 В, максимальная сила тока 55 А, частота вращения ротора, соответствующая номинальному напряжению под нагрузкой – 2000 об/мин, 14 В, 35 А.
- Электрический двигатель 5АИЕ 71 В2 (асинхронный). Мощность 750 Вт, номинальная скорость вращения 3000 об/мин.
- Датчик оборотов FC-03 на базе микросхемы LM393. Интерфейс или тип выходного сигнала энкодера: цифровой TTL.
- Датчик тока обмотки возбуждения ACS712 на 20 А.
- Датчик тока на нагрузке линейный AC/DC 57A, CSLA1CD. Максимальный ток измерения – 57 А.
- Нагрузочные устройства. Реостат балластный «РБ-302», который позволяет рассеять до 315 А при напряжении 75 В. На данном реостате нагрузка включается ступенчато, с помощью 6 рубильников, каждый из которых отвечает за свою нагрузочную цепь. Для имитации индуктивной нагрузки используются катушки индуктивности, предназначенные для сварочных аппаратов с пропускной способностью тока до 300 А.
- Блоки питания. Для подключения электроники минимально необходимо постоянное напряжение 12 В (используется компьютерный блок питания 200-400 Вт). Для стенда используется блок питания FSPGroupATX-350PNR на 5 В. Блок питания Faraday 100W/24V используется для обмотки возбуждения на каждом генераторе.
- Компьютер на архитектуре x86. Данное устройство необходимо для запуска и использования Matlab/Simulink.
- Отладочная плата на базе микроконтроллеров Atmega и STM. Данное решение полностью перекрывает необходимые параметры, к тому же позволяет подключиться кабелем USB – microUSB к ПК и передавать данные напрямую с помощью UART
Перечень выполняемых типовых работ
- Испытание алгоритмов управления сетью электрических генераторов в нормальном режиме работы сети
- Испытание алгоритмов управления сетью электрических генераторов при внезапном изменении активной и реактивной нагрузок в сети.
- Отладка алгоритмов управления электроэнергетической сетью.
- Исследование работы сети электрических генераторов при постоянной и переменной нагрузки в сети.
Перечень применяемых методик измерений
- Измерение, обработка получаемых сигналов, визуализация и управление осуществляется в реальном времени с применением компьютеризованных средств и привлечения лицензированного программного обеспечения MatLab Simulink RealTime 2015.
- Минимально достижимый период квантования времени составляет 0.5 сек.
- Измерение углов поворота ротора - 3 измерения за полный оборот.
- Измерение токов нагрузки, номинальный интервал 40-50 А.
- На каждой из трех фаз находятся по 6 рубильников, ступенчато меняющих сопротивление нагрузки.
Степень уникальности стенда
- Онлайн наблюдением за всеми параметрами в сети.
- Онлайн управлением электрическими генераторами.
- Исследованием любых существующих алгоритмов управления.
- Исследованием новых алгоритмов управления электроэнергетической сетью.
- Программированием алгоритмов управления в программной среде Matlab.
- Проектированием алгоритмов управления в виде блок-схем в программной среде Matlab/Simulink.