

Управление роботизированными комплексами с помощью нейроинтерфейса
О проекте:
Нейроинтерфейс (интерфейс мозг-компьютер) представляет собой сложную систему, позволяющую управлять внешними электронными устройствами с помощью активности головного мозга.
Эта система включает в себя несколько элементов – устройство считывания сигналов активности головного мозга (электроэнцефалограф), аппаратно-программный комплекс, выполняющий обработку и анализ этих сигналов, а также объект управления. Основную сложность представляет разработка методов и алгоритмов, способных правильно распознавать и предсказывать намерения человека, который использует этот интерфейс, чтобы обеспечить решение задач управления.
Такие комплексы должны позволять производить предобработку сигналов ЭЭГ с целью снижений уровня шума и удаления артефактов, выделять информативные признаки, фиксировать и классифицировать намерения человека совершать то или иное движение. Результаты классификации передаются на исполнительные устройства, подключенные к оборудованию или транспортным средствам, что при правильной работе всего комплекса позволяет совершить задуманное движение. Таким образом, процесс анализа сигналов ЭЭГ состоит из нескольких этапов: предобработка сигнала, классификация, и принятие решения о выдаче управляющего сигнала.
Разработанная система управления выполняет обработку данных, получаемых от электроэнцефалографа, и обеспечивает принятие решения о подаче управляющего сигнала на объект управления в режиме реального времени (или близком к нему). В основе разработанной системы лежит идея адаптивности. Система сама обучается распознавать активность мозга пользователя, как бы подстраиваясь под него, а также учитывает изменение навыков пользователя выполнять воображаемые движения.

Сферы применения
Одной из интереснейших и важнейших задач для решения которых применяются нейроинтерфейсы, является управление оборудованием «силой мысли». Ее решение позволит расширить возможности реабилитации пациентов с нарушениями двигательного аппарата, улучшить качество робототехнических протезов, откроет новые возможности управления объектами, находящимися в труднодоступных и опасных областях и т.д. Наиболее перспективное на данный момент применение данной разработки - управление транспортным средством, а именно - инвалидным креслом. Таким образом, выполняется распознавание паттернов активности мозга при воображаемых движениях – движение левой рукой, движение правой рукой, движение обеими руками, а также особое состояние “стоп”. В качестве объекта управления используется роботизированное инвалидное кресло. Управление креслом в данном случае подразумевает его поворот, движение вперёд или остановку в зависимости от текущей активности мозга пользователя нейроинтерфейса.

Испытуемый в инвалидном кресле с электроэнцефалографом на голове
Преимущества
Разработанный подход и его программная реализация в ходе испытаний продемонстрировали эффективность в задачах управления инвалидным креслом. В процессе контрольного тестирования люди, участвовавшие в экспериментах, демонстрировали способность выполнять поворот инвалидного кресла вправо и влево с точностью ~90%, а движение вперёд и остановку - с точностью ~65%.
Реализованный программный комплекс позволяет автоматизировать процесс обучения системы управления, что упрощает практическое применение подхода в системах управления движением транспортного средства. Этот процесс не требует привлечения специалистов и может быть выполнен самим пользователем.
Также было уделено особое внимание ресурсоёмкости программной реализации. Методы и алгоритмы были реализованы с учётом требований, возникающих при их выполнении на низкопроизводительных устройствах с ограниченным объемом памяти.
Цифры
Испытания показали, что разработанный подход позволяет существенно повысить точность распознавания воображаемых движений. За время испытания происходит адаптация как системы управления, так и испытуемого.
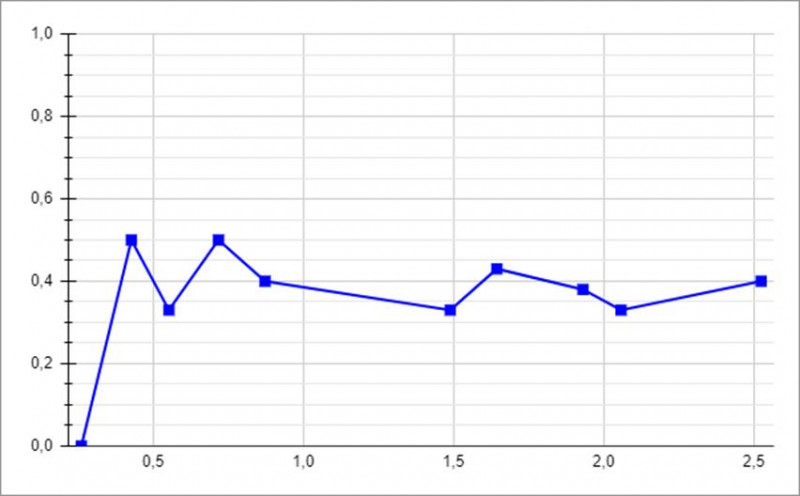
График изменения точности распознавания (вертикальная ось) воображаемых движений левой и правой рукой во времени (горизонтальная ось, минуты) до адаптации
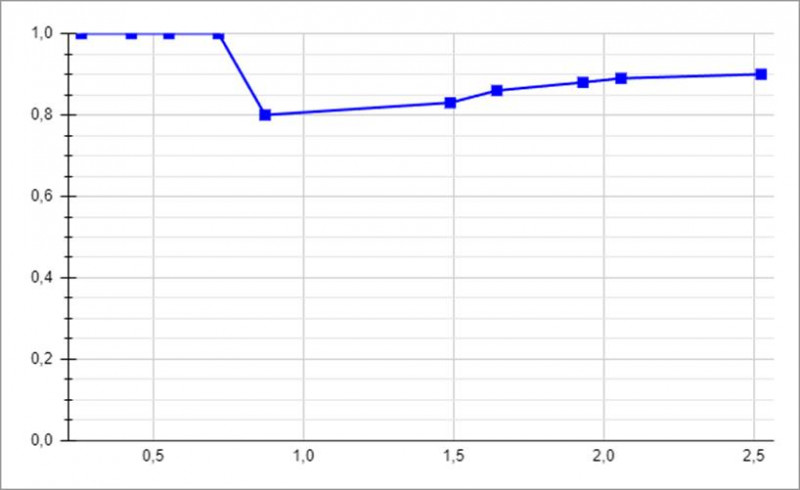
График изменения точности распознавания (вертикальная ось) воображаемых движений левой и правой рукой во времени (горизонтальная ось, минуты) в процессе контрольного тестирования
Таким образом, точность распознавания в ходе адаптации повысилась более, чем вдвое. До адаптации точность распознавания P ≈ 0.4 (40%), а во время контрольного тестирования – P ≈ 0.9 (90%).
Пользователи: люди, потерявшие возможность двигать конечностями самостоятельно.
Цели: повышение уровня мобильности людей с ограниченными возможностями.
Контакты:
Заведующий лабораторией управления сложными системами Института проблем машиноведения РАН Фрадков Александр Львович alf@ipme.ru
Заведующий лабораторией Цифровизация, анализ и синтез сложных механических систем, сетей и сред Института проблем машиноведения РАН Плотников Сергей Александрович waterwalf@gmail.com, psa@ipme.ru